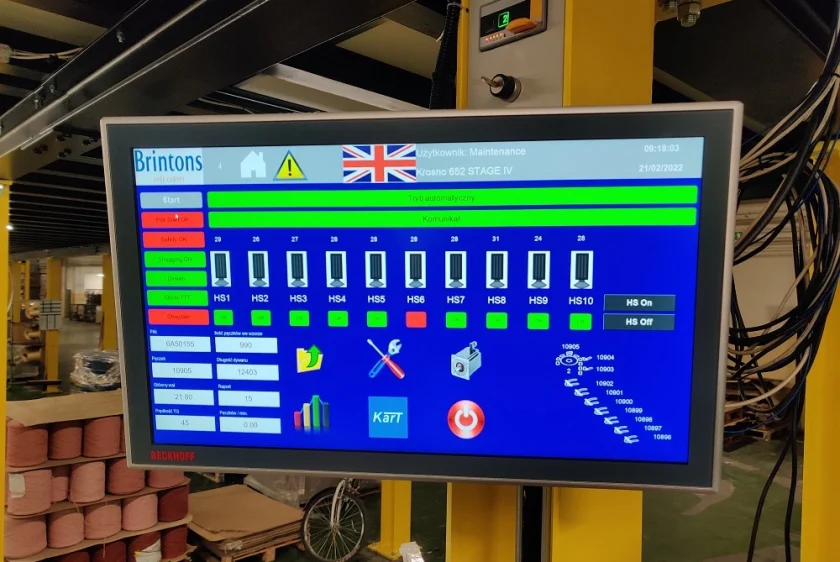
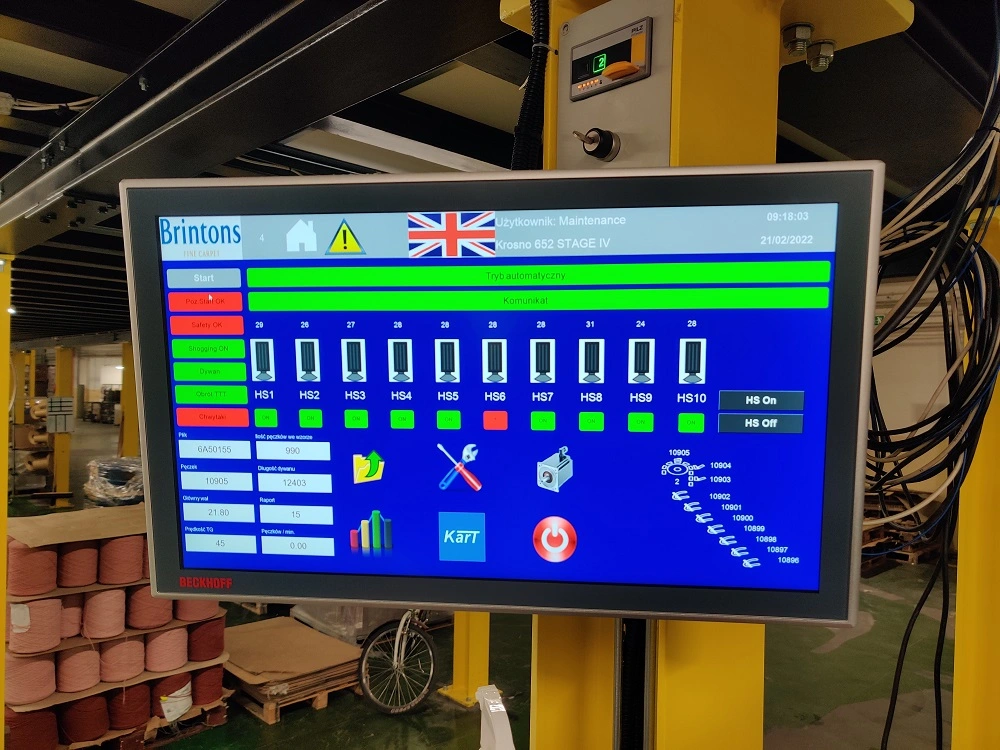
Together with Brintons Agnella Sp. z o.o., we carried out a project involving the modernization of the Stage IV loom. KarT Sp. z o.o. designed and built a prototype Tuft Generator for feeding and cutting yarns for the specified loom. The changes in the technological process, resulting from the use of the developed prototype, allowed for increased efficiency and reduced raw material and electricity consumption during production. An important feature of the modernization is also the enhanced safety of the machine and its operators.
The completed modernizations enabled the loom to produce products with 32 different yarn colors (previously, it was only possible to produce carpets with a maximum of 16-20 yarn colors). With 32 colors, the loom operates at a speed of approximately 15 bundles per minute.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}